
1/13 On Chandrayaan-2 landing failure:
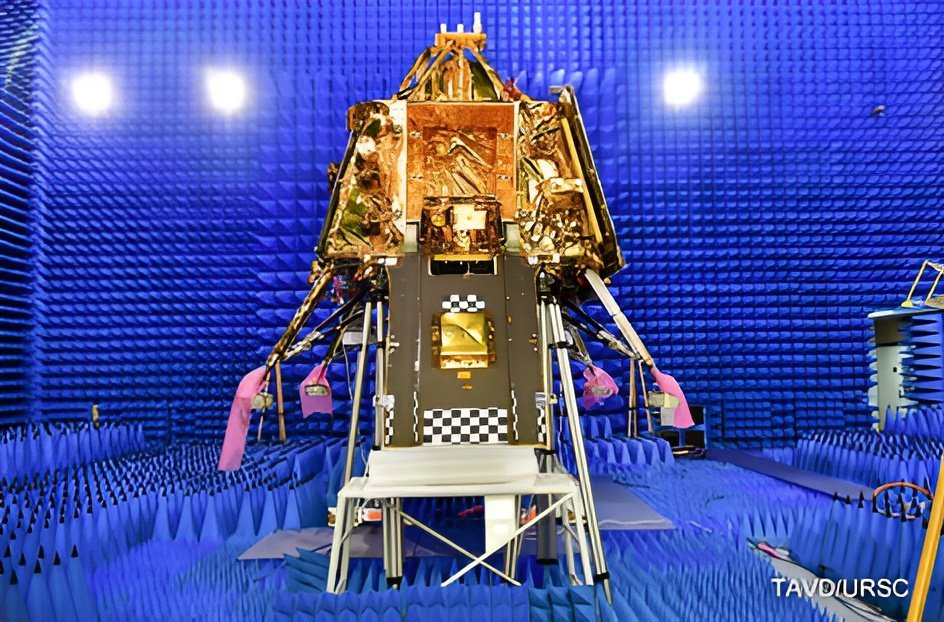
Finally we have got the image of the fully assembled Chandrayaan-3 (below). Our second lunar landing endeavor. In this context, I would like to talk a bit about CY-2 landing failure. What actually happened?
Finally we have got the image of the fully assembled Chandrayaan-3 (below). Our second lunar landing endeavor. In this context, I would like to talk a bit about CY-2 landing failure. What actually happened?
2/13 Experts did a study on it but the findings were never published. I learned something about it from a seminar by @DrPVVenkitakri1 sir. Here I am explaining it in simple words based on that.
3/13 Any propulsive lander uses thrusters to decelerate from orbital velocity. Thrusters are tiny rockets. They apply force against gravity and using multiple thrusters with controlled variation in thrust, the lander can be slowed down and properly oriented for a soft touchdown.
4/13 So being a force generator, a thruster obeys Newton's 2rd and 3rd laws. But, being a rocket, a thruster obeys the 2nd law with an extra complication: in F=m(dv/dt), m (i.e. spacecraft mass) itself is time-varying as well.
5/13 There is a continuous engine burn for deceleration from orbital velocity to almost zero velocity so there is a continuous use of propellant. So the fuel is continuously depleting and hence spacecraft mass is continuously reducing.
6/13 So to maintain a constant deceleration in F=ma, F needs to be continuously decreasing as well. So thrust should be continuously changing.
A thruster which can change its thrust is called a 'throttlable thruster'. A continuously throttlable thruster was needed for Vikram.
A thruster which can change its thrust is called a 'throttlable thruster'. A continuously throttlable thruster was needed for Vikram.
7/13 But such a thruster is technologically very complex. ISRO was not able to make such an engine that time. So they did something frugal. They went for step-by-step throttle i.e. 40% throttling, then 60%, 80% and 100% throttling (i.e. off) and make it to zero lander velocity.
8/13 In 60% or 80% throttling, what thrust they actually planned was not sufficient. So the velocity was more than expected. Up to 2.1 km altitude, they were dot on spot but beyond that the velocity was slightly more than what they expected.
9/13 The spacecraft was running under 'Closed Loop Guidance' (CLG) which means a guidance system that works as a feedback loop. Sensors inform the spacecraft its real trajectory/deviation and comparing it to preprogrammed trajectory, engines guide it.
10/13 There were multiple phases in entire landing process we know. Rough braking, fine braking, hovering etc. From rough to fine braking phase transitioning moment, that velocity deviation happened. It was small but the next part of the code was not prepared for such deviation.
11/13 As such a deviation was not expected because it originated from unknown deficiency in thrust control, the next part of algorithm wasn't tested for such extreme case. CY-2 Vikram lander was not sufficiently robust one to be honest. It lacked couple of vital sensors as well.
12/13 So CLG was not working properly. Vikram faced uncontrolled force and torque making it spin out of control. It couldn't reduce velocity as per plan any more and it crash landed on lunar surface. Perhaps due to dramatic orientation change, communication was lost as well.
13/13 In Chandrayaan-3, they're going to test the engine to the maximum limits. They will go for little more discrete throttling: 10% throttling instead of 20%. The lander has got other modifications as well like two more landing sensors, bigger fuel tank, more solar panel etc.
Loading suggestions...